4WD eXplorer
Veicolo a quattro ruote sterzanti e quattro ruote motrici con sistema di sospensione
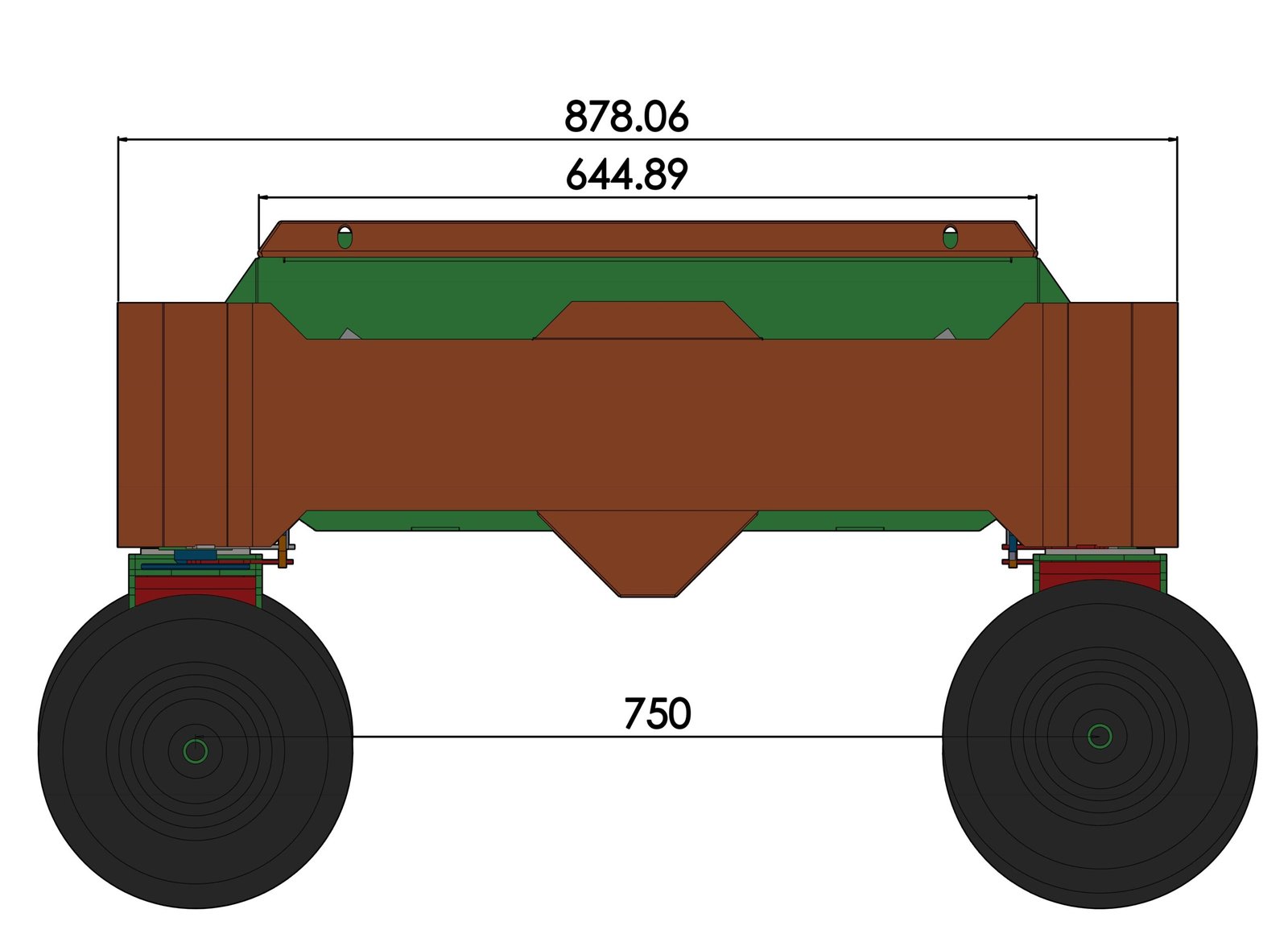
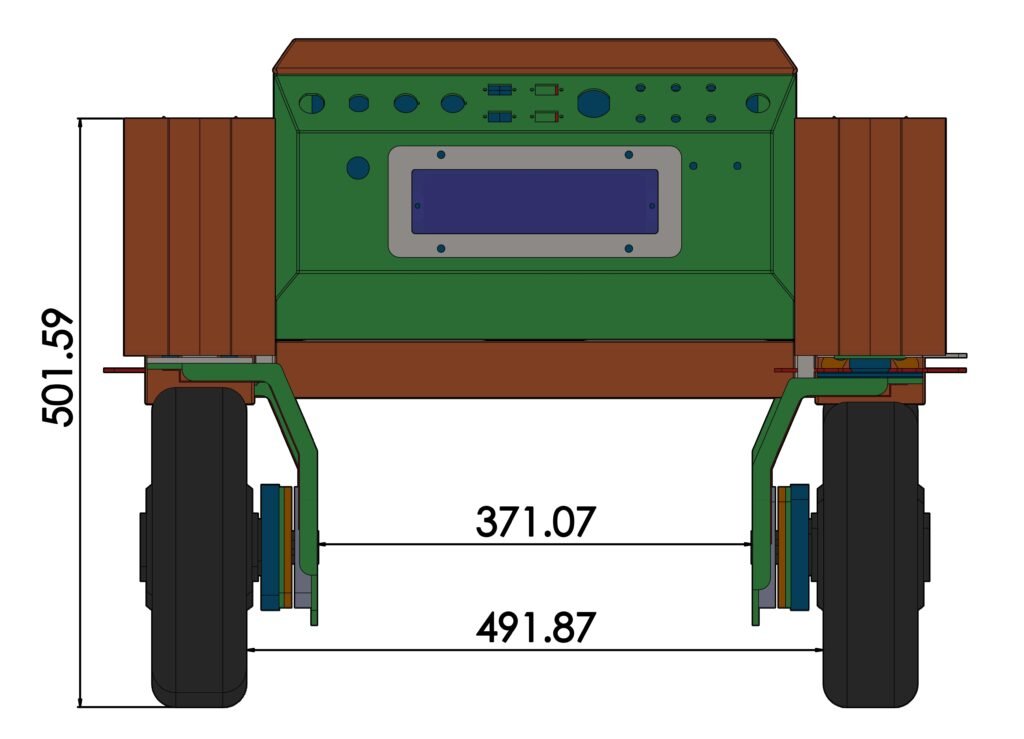
4WD eXplorer è un veicolo di tipo ackermann olonomico con quattro ruote sterzanti e quattro ruote motrici con un sistema di sospensioni in grado di stabilizzare il telaio anche su terreni sconnessi. Il veicolo robotizzato può essere impiegato per una grande varietà di applicazioni e per velocizzare le attività di ricerca. Di solito, eXplorer è configurato con un sensore laser da 360°, telecamera RGB-D, encoders, sensori di corrente e GPS RTK con un’alta precisione. Grazie ai suoi cingoli in gomma, può essere usato sia per applicazioni indoor che outdoor e il suo carico massimo accettabile consente all’utente di aggiungere dispositivi e laptop. In più, fornisce una serie di output di potente per poter collegare componenti da 12V e 24V e la sua altezza da terra gli permette di superare ostacoli come pietre e detriti. L’alta distanza da terra e il sistema di sospensioni consentono al veicolo di superare facilmente ostacoli e detriti presenti a terra.